RC-Paragleiter Mischereinstellung für MC/MX Serie
Aus GH-Lounge
Inhaltsverzeichnis
RC-Paragleiter mit Graupner MC/MX Serie und MZ-12
Die Problemstellung
Ein Paragleiter wird in der Regel mit 2 Servos zum Steuern der Richtung und dem Bremsen gesteuert. Dabei sind die Servos in Nullstellung tatsächlich auf 100% eines Servowegs und die Steuerbewegung laufen über Neutralstellung hinaus bis auf -100%. Der Geber hingegen wird weiterhin auf aus der Neutralstellung agieren. Bewegt man als den Geber des Querruders nach Links, so muss sich das Linke Servo von 100% auf -100% bewegen ohne dass das rechte Servo beeinträchtigt wird. Zum Bremsen wird dann der halbe Geberweg das Höhenruder verwendet was auf die beiden Servos synchron wirken muss. Auch hier muss der Servoweg von 100% bis -100% ansteuerbar werden. In der Beschreibung spreche ich dann von Querruder kurz QR und Höhenruder kurz HR.
Leider sind im Netz viele schlechte Lösungen vorhanden die viel zu kompliziert programmiert wurde und dazu oft nicht den gesamten Weg abdecken welche den Servos machen müssen.
Hier nun die einfachste Lösung die auch sauber zu Trimmen und zu Übersteuern ist.
Schritt 1 Modelltyp einstellen
Ein Flugzeug Anlegen Im Modelltyp
- Leitwerk Delta/Nf
- Querruder/Wölbklappen auf 2QR
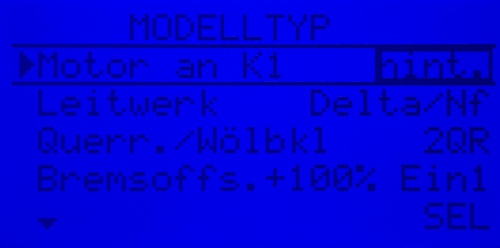
Damit erreichen wir das schon mal das Höhenruder in die Querruder reingemischt werden.

Schritt 2 Servowege und Servobegrenzungen einstellen
Wir müssen die Servowege einstellen. Dazu wird die Mitte von beiden Servos auf 100% gestellt (Gegenläufigkeit beachten)

Die Begrenzung der beiden Servos muss auf 100% gestellt werden damit eine spätere Überladung der Wege durch Mischer verhindert wird.

Schritt 3 Linearmischer für das Querruder
Nun müssen wir dafür sorgen das der Geber des QR auch wirklich 100% Servoweg erreicht. Das machen wir in dem wir das QR auf sich selbst mischen. Hierzu ein Linearmischer anlegen. In meinem Fall der Mischer M1.

Dieser wird symmetrisch mit +100% angelegt was dann so aussieht.

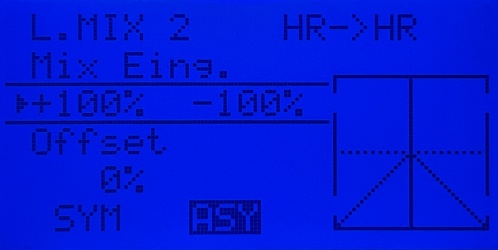
Schritt 4 Linearmischer für das Höhenruder
Das Höhenruder auf die Arme mischen. Dazu legen wir einen weiteren Linearmischer an der das HR auf sich selbst mischt.

Nun ist es wichtig eine Asynchronen Mischer zu definieren um die Geberbewegung HR->Steigen zu neutralisieren und den Geberweg HR-Sinken auf 100% der Servowege zu mischen. Das sieht dann so aus.
Tipp: Zum Einstellen, den Geber einfach in die entsprechende Position bringen

Das ist alles, um die Arme so zu mischen das man einen Fallschirm oder Paragleiter steuern kann.
Downloads
Medium:RC-ParaDokuGraupner.pdf Diese Doku als PDF zum ausdrucken.